特長(zhǎng)
-
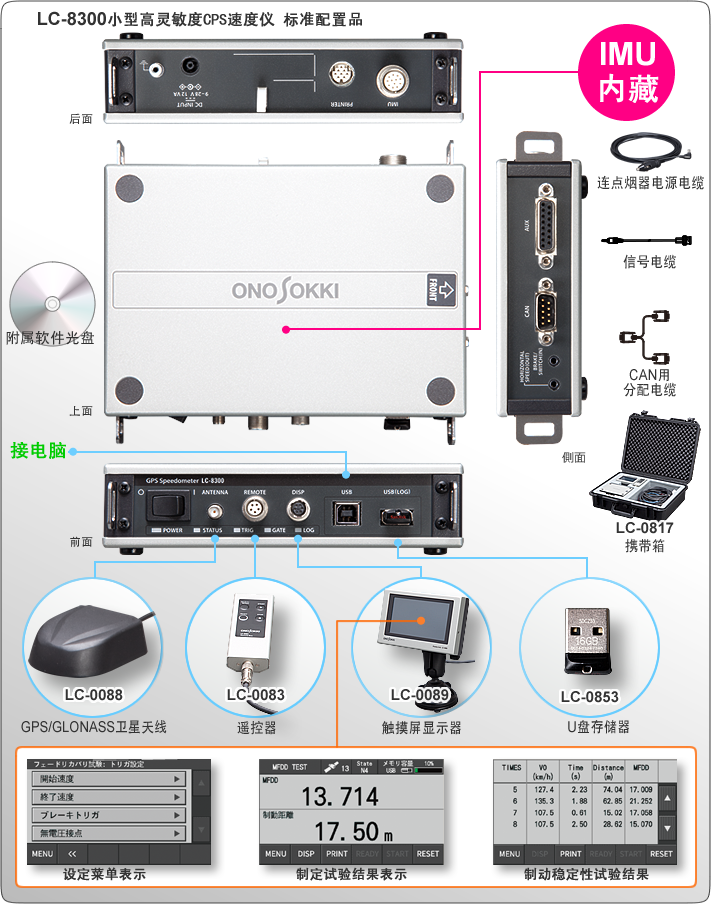
高靈敏度:GPS信號(hào)接收靈敏度高�,GLONASS信號(hào)也可高靈敏度接收,衛(wèi)星天線可設(shè)置在車廂內(nèi)進(jìn)行測(cè)量�����。
-
小型緊湊:內(nèi)置IMU的本機(jī)重量約0.75 kg�,使用本機(jī),表示器����,衛(wèi)星天線共3部分即可使用測(cè)量。
-
脫電腦:通過配套的U盤存儲(chǔ)器即可測(cè)量記錄數(shù)據(jù)
-
操作性能提高:采用觸摸式顯示器操作簡(jiǎn)單方便
-
高精度:速度±0.2 km/h以內(nèi)�,距離±0.2 %以內(nèi)的高精度
-
高性能:標(biāo)準(zhǔn)配置4通道模擬信號(hào)輸入,1通道脈沖輸入�����,64通道CAN數(shù)據(jù)輸入�����,可滿足各種測(cè)量需要
-
速度的模擬信號(hào)輸出 / 距離的脈沖信號(hào)輸出(可選擇)
-
配有攜帶箱便于儀器保管與攜帶運(yùn)送
-
可使用打印機(jī)輸出測(cè)量數(shù)據(jù)結(jié)果
-
測(cè)量數(shù)據(jù)更新周期10 ms
-
通過LED表示本機(jī)狀態(tài)
-
捕捉衛(wèi)星信號(hào)數(shù)不足時(shí)報(bào)警通知
-
可以導(dǎo)入外部觸發(fā)功能
-
4通道模擬信號(hào)輸入±20 V�,1通道脈沖輸入
-
采用觸摸式顯示器可直接在顯示器上進(jìn)行操作
-
可以使用CAN進(jìn)行數(shù)據(jù)輸入輸出
-
可使用CAN或脈沖數(shù)據(jù)對(duì)速度數(shù)據(jù)進(jìn)行補(bǔ)償處理
-
可使用LC-8000系列的各種軟件
-
可測(cè)量3軸加速度,3軸角速度
-
數(shù)據(jù)文件可以用CSV格式輸出保存
高精度數(shù)據(jù)測(cè)量 – 使用GPS進(jìn)行速度測(cè)量的原理
當(dāng)聲波���、電波或者是光波等的發(fā)生源與觀測(cè)者之間存在速度差異時(shí)���,被觀測(cè)到的波的頻率會(huì)有不同,發(fā)生源接近觀測(cè)者時(shí)�����,被觀測(cè)到的波的頻率變高���,反之��,發(fā)生源遠(yuǎn)離觀測(cè)者時(shí)�,被觀測(cè)到的波的頻率變低��。這種現(xiàn)象稱為多普勒效應(yīng)。并可以用以下公式表示���。
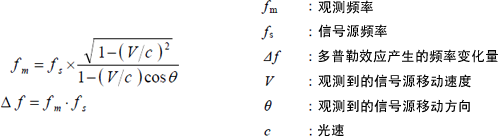
GPS衛(wèi)星系統(tǒng)的載波信號(hào)的頻率管理非常精密嚴(yán)格���,可以利用多普勒效應(yīng)測(cè)量速度V。但是����,GPS衛(wèi)星的移動(dòng)速度非常高,并且地球本身也有自轉(zhuǎn)的影響�,通過1個(gè)GPS衛(wèi)星的載波信號(hào)頻率,不可能測(cè)出對(duì)地的速度值����。如下圖所示,通過對(duì)復(fù)數(shù)個(gè)(4個(gè)以上)GPS衛(wèi)星的載波信號(hào)頻率進(jìn)行測(cè)量�����,可測(cè)到速度以及位置值����,由此可以得到移動(dòng)物體的高精度速度測(cè)量數(shù)據(jù)。
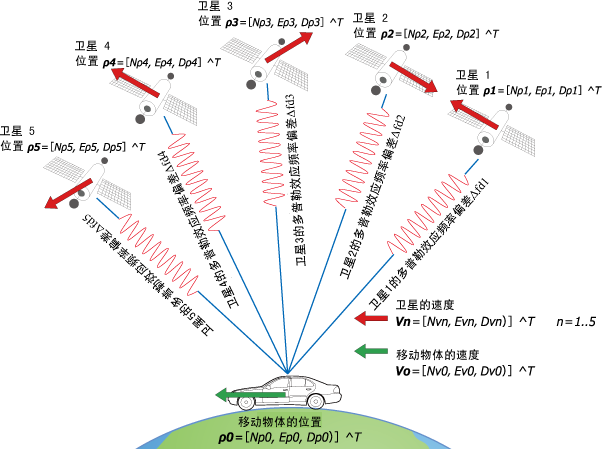
使用此種方法,可以不受電離層的影響�����,與由位置的變化量計(jì)算出速度的方法相比較��,可以非常高的精度測(cè)量計(jì)算出移動(dòng)物體的移動(dòng)速度���。其水平成分的精度為2 σ時(shí),0.03 m/s�,3 σ時(shí),0.08 m/ s����。由于衛(wèi)星系統(tǒng)的原理,垂直成分的精度比較水平成分要差3倍�����。通過上圖�����,可以看出移動(dòng)物體接受到復(fù)數(shù)個(gè)衛(wèi)星的不同頻率偏移的載波信號(hào)�����。
可導(dǎo)出下式:
Δ fd1 = 1/ λ(V0?u1 - V1?u1)+ fb
Δ fd2 = 1/ λ(V0?u2 - V2?u2)+ fb
Δ fd3 = 1/ λ(V0?u3 - V3?u3)+ fb
Δ fd4 = 1/ λ(V0?u4 - V4?u4)+ fb
Δ fd5 = 1/ λ(V0?u5 - V5?u5)+ fb
這里,λ為衛(wèi)星載波信號(hào)頻率的波長(zhǎng)約0.19 m�,fb為接收信號(hào)的頻率偏差(Hz),un(n = 1..5)為衛(wèi)星與信號(hào)接收器在視線方向上的單位矢量��,單位矢量可由下式算出�。
un =ρ n/| ρ n|(n = 1..5)
ρ n =[(Npn - Np0),( Epn - Ep0),( Dpn - Dp0)]^T(n = 1..5)
通過,以上計(jì)算方程���,解出Vo����。即可得到移動(dòng)物體的速度����。
穩(wěn)定測(cè)量 - 使用IMU慣性測(cè)量單元補(bǔ)償處理
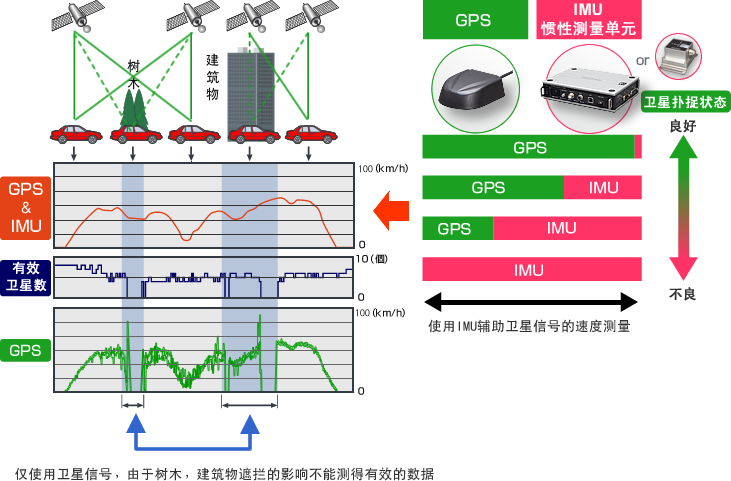
由于一般道路兩側(cè)存在的樹木,建筑物等影響��,如下圖所示�,多普勒方式的速度測(cè)量值會(huì)包含大量的干擾成分,另外���,通過像過街天橋�����,高架橋下等妨害衛(wèi)星信號(hào)的接收的地段時(shí)�,僅利用GPS等衛(wèi)星信號(hào)單獨(dú)進(jìn)行速度測(cè)量是不可能的。
如果將衛(wèi)星信號(hào)測(cè)量的速度數(shù)據(jù)與IMU的3軸加速度傳感器/3軸陀螺儀計(jì)算的速度之間的比例算出進(jìn)行補(bǔ)償����,在存在干擾的狀態(tài)下,如下圖所示�,必較單獨(dú)使用衛(wèi)星信號(hào)時(shí),可以得到非常平緩的高精度速度測(cè)量數(shù)據(jù)��。
另外���,在通過像過街天橋,高架橋下等妨害衛(wèi)星信號(hào)的接收的地段時(shí)���,如果使用IMU慣性測(cè)量單元進(jìn)行速度的補(bǔ)償處理�����,在較短時(shí)間內(nèi)即使接收不到衛(wèi)星信號(hào)的情況下���,也可以測(cè)量到高精度連續(xù)的速度數(shù)據(jù)。
系統(tǒng)構(gòu)成
本機(jī)與電腦軟件對(duì)應(yīng)測(cè)量試驗(yàn)對(duì)照表
※:以上試驗(yàn)功能及試驗(yàn)軟件均為選配件����。
本機(jī)對(duì)應(yīng)試驗(yàn)測(cè)量畫面表示
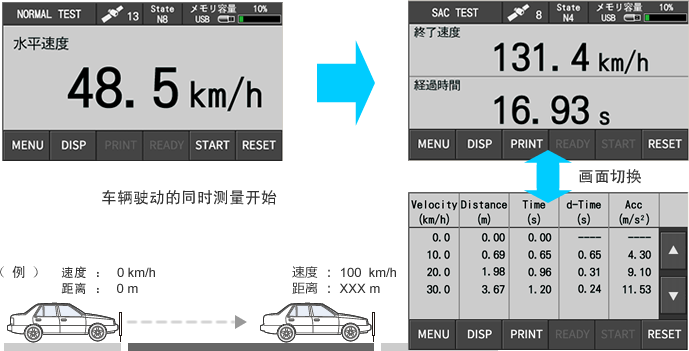
1. 起動(dòng)加速試驗(yàn)
-
測(cè)量車輛由停止?fàn)顟B(tài)全力加速車輛達(dá)到設(shè)定達(dá)到速度或設(shè)定達(dá)到距離時(shí)的所用時(shí)間。
-
對(duì)加速車輛的途中經(jīng)過數(shù)據(jù)進(jìn)行確認(rèn)�����。
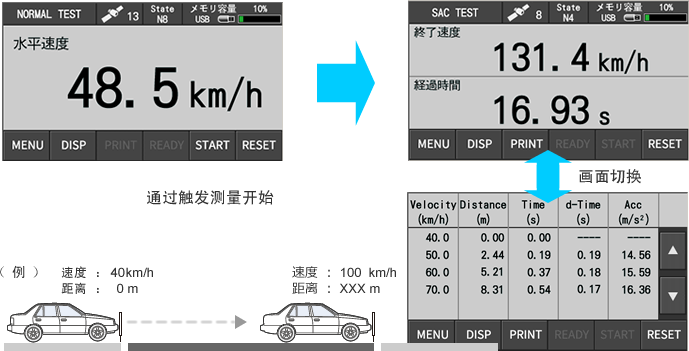
2. 行駛加速試驗(yàn)
-
測(cè)量車輛由設(shè)定速度狀態(tài)全力加速車輛達(dá)到設(shè)定達(dá)到速度或設(shè)定達(dá)到距離時(shí)的所用時(shí)間��。
-
對(duì)加速車輛的途中經(jīng)過數(shù)據(jù)進(jìn)行確認(rèn)�。
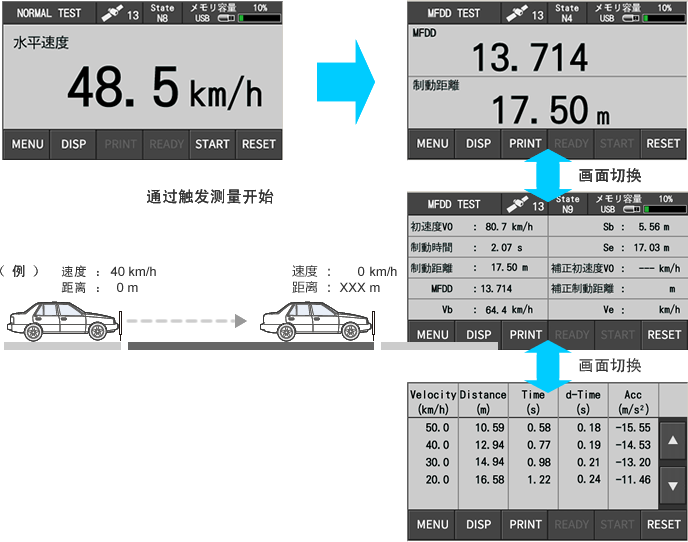
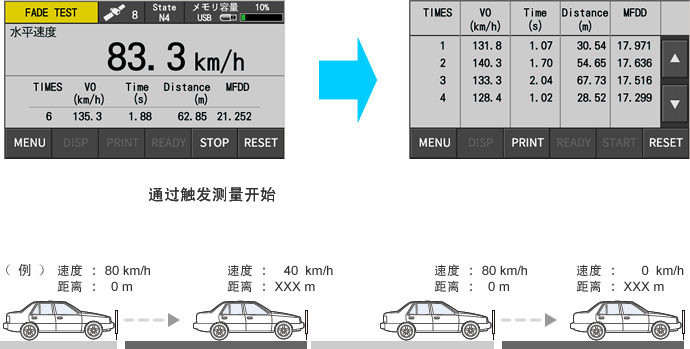
3. 制動(dòng)試驗(yàn)(MFDD)
-
測(cè)量車輛由規(guī)定速度(初速度)狀態(tài)全力制動(dòng)車輛達(dá)到車輛停止時(shí)的所用時(shí)間,移動(dòng)距離����,制動(dòng)初速度。
-
由各測(cè)量數(shù)據(jù)計(jì)算出減速度并對(duì)車輛行駛途中經(jīng)過數(shù)據(jù)進(jìn)行確認(rèn)��。
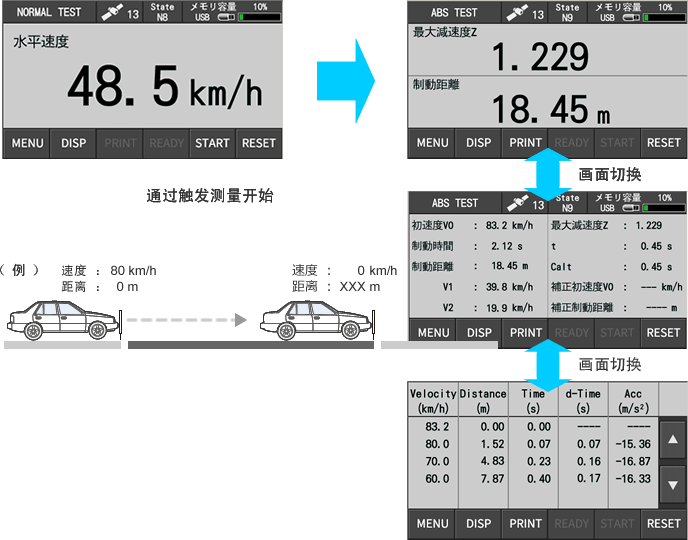
4. 制動(dòng)試驗(yàn)(ABS)
-
制動(dòng)試驗(yàn),根據(jù)設(shè)定的區(qū)間車速測(cè)量車輛的區(qū)間速度��。
-
由各測(cè)量數(shù)據(jù)計(jì)算出減速度并對(duì)車輛行駛途中經(jīng)過數(shù)據(jù)進(jìn)行確認(rèn)���。
5. 制動(dòng)試驗(yàn)(制動(dòng)穩(wěn)定性)
-
反復(fù)進(jìn)行的制動(dòng)試驗(yàn)����,測(cè)量各次的車輛制動(dòng)時(shí)的MFDD數(shù)據(jù)值����。
-
由各測(cè)量數(shù)據(jù)計(jì)算出減速度并對(duì)車輛行駛途中經(jīng)過數(shù)據(jù)進(jìn)行確認(rèn)。
-
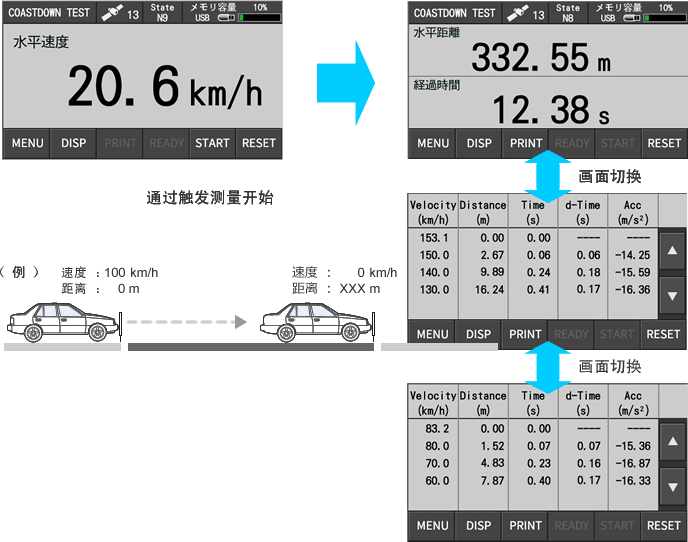
6. 滑行試驗(yàn)
-
測(cè)量車輛在高于規(guī)定速度的車速狀態(tài)下���,由規(guī)定速度起滑行至車輛停止時(shí)的所用時(shí)間����,移動(dòng)距離�,行駛速度�。
-
由各測(cè)量數(shù)據(jù)計(jì)算出CD數(shù)據(jù)值并對(duì)車輛行駛途中經(jīng)過數(shù)據(jù)進(jìn)行確認(rèn)。
規(guī)格
工作環(huán)境
*Windows® XP, Windows Vista®, Windows® 7 是微軟公司在美國(guó)和/或其他國(guó)家或地區(qū)的商標(biāo)或注冊(cè)商標(biāo)。
*Intel®, Intel® Core��,Core Inside是英特公司在美國(guó)和/或其他國(guó)家或地區(qū)的商標(biāo)或注冊(cè)商標(biāo)����。
其他選配件
●為了提高性能,可能不經(jīng)預(yù)告而變更外形及規(guī)格���,請(qǐng)諒解�����。
